必要な用語や手法に関する解説も一緒におこなっていきますので、参考書代わりに本記事を使ってみてください。
目次
令和4年測量士補試験No.8の問題文
次の文は,GNSS 測量について述べたものである。(ア)~(オ)に入る語句の組合せとして最も適当なものはどれか。次の中から選べ
(ア)測位とは,搬送波位相を用いて 2 点間の相対的な位置関係を決定する方法をいう。(ア)測位では,共通の衛星について 2 点間の搬送波位相の差を取ることで,(イ)誤差が消去された一重位相差を求める。さらに, 2 衛星についての一重位相差の差を取ることで(イ)誤差に加え(ウ)誤差が消去された二重位相差を得る。これらを含めた(エ)により,基線ベクトルを求める。
公共測量における 1 級基準点測量において,電子基準点のみを既知点とした GNSS 測量を行う場合,測量計算に及ぼす地殻変動によるひずみの影響が大きくなるため,(オ)を行う必要がある。
- (ア)単独(イ)受信機時計(ウ)衛星時計(エ)三次元網平均計算(オ)PCV補正
- (ア)単独(イ)受信機時計(ウ)衛星時計(エ)基線解析(オ)セミ・ダイナミック補正
- (ア)干渉(イ)衛星時計(ウ)受信機時計(エ)三次元網平均計算(オ)セミ・ダイナミック補正
- (ア)干渉(イ)受信機時計(ウ)衛星時計(エ)基線解析(オ)PCV補正
- (ア)干渉(イ)衛星時計(ウ)受信機時計(エ)基線解析(オ)セミ・ダイナミック補正
(令和4年測量士補試験問題集 No8)
令和4年測量士補試験No.8の解答・解説
「汎地球測位システム測量」の分野からの出題です。
解答は「5」となります。
以下、各語句についての詳しい解説です。
(ア)について
『(ア)測位とは,搬送波位相を用いて 2 点間の相対的な位置関係を決定する方法をいう。』
上記文章の(ア)には「干渉測位」が入ると考えられます。
GNSSを利用した測位方法には主に以下の2種類があります。
- 単独測位:受信機を1台使用して複数の衛星から受信機の位置を求める方法
- 干渉測位:受信機を複数台利用して複数の衛星から角受信機の相対的な位置を求める方法
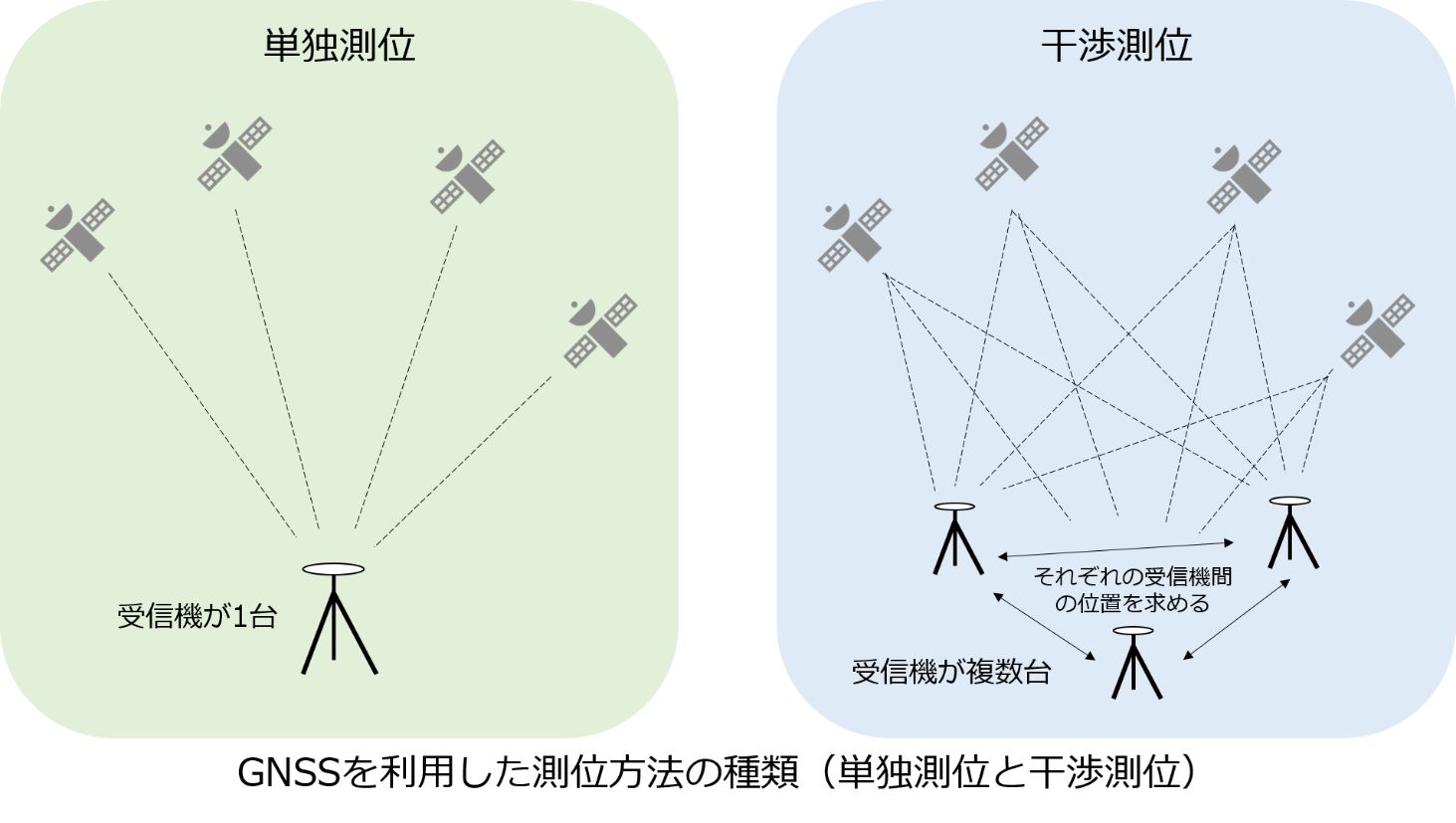
よって今回の文章であれば「2点間の相対的な位置関係を決定する方法」とあるため、干渉測位の方が適していると考えられます。
(イ)について
「(ア)測位では,共通の衛星について 2 点間の搬送波位相の差を取ることで,(イ)誤差が消去された一重位相差を求める。」
上記文章の(イ)には「衛星時計」が入ると考えられます。
まず、搬送波位相とは何かですが…観測量のことです。
観測量の意味が正直よくわからない方も多いと思いますが、「衛星から受信機までの距離」や「衛星の時計の誤差」や「受信機の時計の誤差」などの要素が含まれた情報だと考えてもらえるとよいです。
(イ)に関する文章のように「共通の衛星について2点間の搬送波位相の差を取る」ということは下図のような状況を表します。ちなみに、この搬送波位相の差のことを行路差や一重位相差と呼びます。
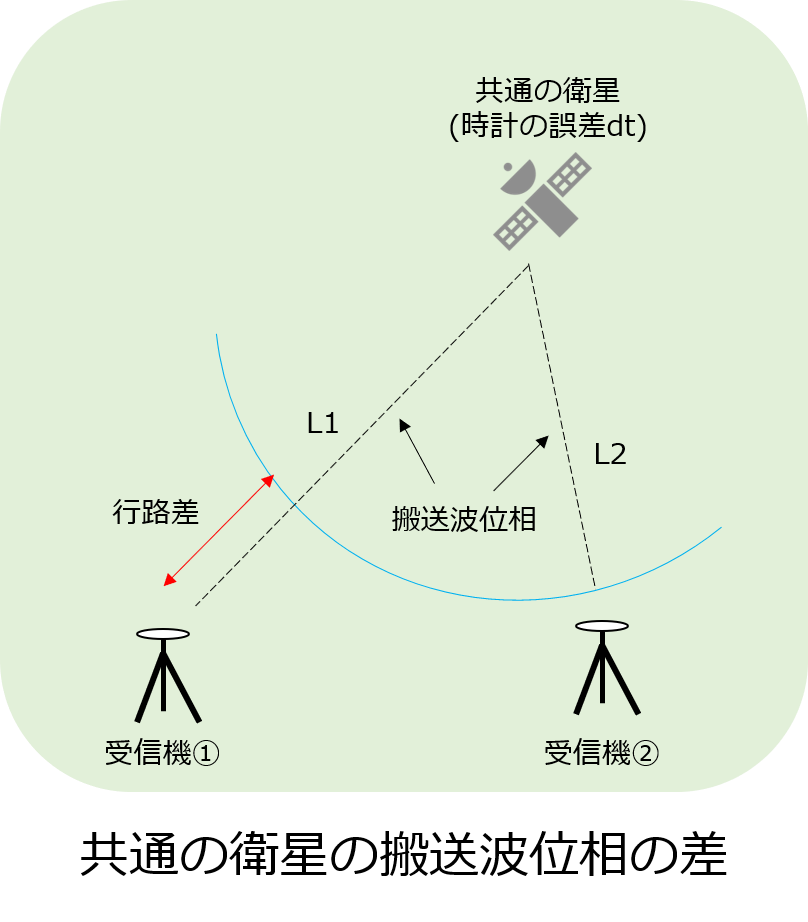 さきほど搬送波位相(=観測量)には「衛星の時計の誤差」が含まれているというお話をしましたので、衛星の時計の誤差をdtとすると
さきほど搬送波位相(=観測量)には「衛星の時計の誤差」が含まれているというお話をしましたので、衛星の時計の誤差をdtとすると
- 受信機①と衛星の搬送波位相=L1+dt
- 受信機②の衛星の搬送波位相=L2+dt
と表すことができます。
あとは搬送波位相の差(=行路差)を求めると
行路差=受信機①と衛星の搬送波位相-受信機②と衛星の搬送波位相
=(L1+dt)-(L2+dt)
=L1-L2+dt-dt
=L1-L2
となり、衛星の時計の誤差を無くすことができました。
よって共通の衛星について 2 点間の搬送波位相の差を取ることで,衛星時計誤差が消去された一重位相差を求めることができます。
つまり、(イ)に入る言葉は時計誤差ということになります。
(ウ)について
「さらに, 2 衛星についての一重位相差の差を取ることで(イ)誤差に加え(ウ)誤差が消去された二重位相差を得る。」
上記文章の(ウ)には「受信機時計」が入ると考えられます。
まずは(イ)の解説のときと同様に、今度は2衛生についての一重位相差を考えてみましょう。
 (イ)の解説で、搬送波位相(=観測量)には「受信機の時計の誤差」が含まれているというお話をしました。
(イ)の解説で、搬送波位相(=観測量)には「受信機の時計の誤差」が含まれているというお話をしました。
つまり、それぞれの搬送波位相は
- 受信機と衛星①の搬送波位相=l1+dT
- 受信機と衛星②の搬送波位相=l2+dT
と表すことができます。
あとは搬送波位相の差(=行路差)を求めると
行路差=受信機と衛星①の搬送波位相-受信機と衛星②の搬送波位相
=(l1+dT)-(l2+dT)
=l1-l2+dT-dT
=l1-l2
となり、受信機の時計の誤差を無くすことができました。
(イ)で説明した「衛星の時計が持つ誤差を無くすこと」とあわせて、受信機と衛星の行路差をそれぞれ計算していくことで受信機と衛星のそれぞれの時計の誤差をなくせることがわかりましたね。
また、このそれぞれの時計の誤差をなくした位相差の組み合わせを二重位相差といいます。
よって(ウ)には「受信機時計」が入ることがわかりました。
(エ)について
「これらを含めた(エ)により,基線ベクトルを求める。」
上記文章の(エ)には「基線解析」が入ると考えられます。
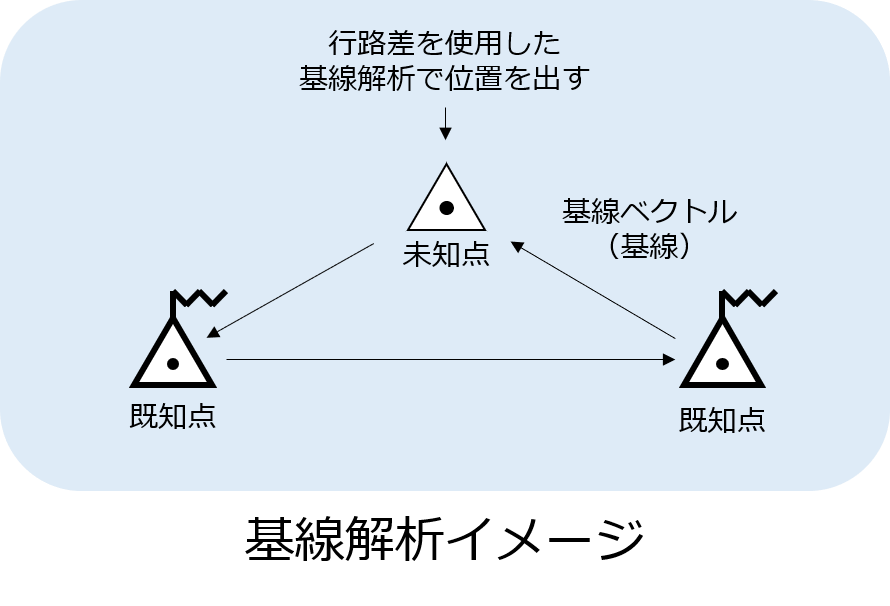
まず「基線とはある地点からある地点を結んだ線のこと」で「各地点の位置関係のことを基線ベクトル」と言います。
そしてこの基線ベクトルを求める作業のことを基線解析と言います。
基線解析では、既知点(国土地理院が管理する電子基準点など)を利用して未知点の位置を割り出していきます。
 よって(エ)には「基線解析」が入ると考えられます。
よって(エ)には「基線解析」が入ると考えられます。
(オ)について
「公共測量における 1 級基準点測量において,電子基準点のみを既知点とした GNSS 測量を行う場合,測量計算に及ぼす地殻変動によるひずみの影響が大きくなるため,(オ)を行う必要がある。」
上記文章の(オ)には「セミ・ダイナミック補正」が入ると考えられます。
セミ・ダイナミック補正とは「基準日に測量した座標と、今回測量した座標で発生したズレ」を補正することです。
地殻変動で、地球上の位置は少しずつ変わっていきます。
そのため、ある地点を測量してもその測量した年が変わると、同じ地点のはずなのに座標にズレが生じてしまうのです。
GNSS測量を行う場合はその解析の際に使用する電子基準点までの距離が10~20km程度離れていることもあり、地殻変動の影響も受けやすくなっています。
よって、GNSS測量の成果を解析する際には、セミ・ダイナミック補正を行い、既知点の値が未知点を測量した時点に合うように補正しなければなりません。
また、セミ・ダイナミック補正の適用については、国土地理院が定める作業規程の準則の第2章 第6節 42条の4の六に、以下の通り記載があります。
六 基線解析の固定点の緯度及び経度は、成果表の値(以下この章において「元期座標」という。)又は国土地理院が提供する地殻変動補正パラメータを使用してセミ・ダイナミック補正を行った値(以下この章において「今期座標」という。)とする。なお、セミ・ダイナミック補正に使用する地殻変動補正パラメータは、測量の実施時期に対応したものを使用するものとする。以後の基線解析は、固定点の緯度及び経度を用いて求められた緯度及び経度を順次入力するものとする。
(作業規程の準則 P25)
また、国土地理院のHPでもセミ・ダイナミック補正についてまとめられています。→セミ・ダイナミック補正(国土地理院)
以上のことから、(オ)には「セミ・ダイナミック補正」が入ると考えられます。
また、セミ・ダイナミック補正については測量士補試験でも過去に計算問題として出ています。
セミ・ダイナミック補正について知る良い機会でもありますので、ぜひトライしてみてください!
過去問はコチラです!→令和3年測量士補試験No.9の解答・解説
令和4年測量士補試験No.8のまとめ
「汎地球測位システム測量」からの出題でした。
GNSSを利用した測量の、原理から解析までの内容に関する問題でしたね。
目に見えない衛星や補正に関する内容でしたので少しイメージしづらかった部分もあるかと思いますが、内容としてはとても重要なものです。
しっかりとおさえておきましょう!
その他の測量士補試験の問題に挑戦!
令和4年のNO.8の問題を確認したら、その他の問題にも挑戦していきましょう!
本ブログでは各問題の解説を年度ごとに一覧にまとめたページがありますので、ぜひその記事からその他の問題に挑戦してみてください!
問題解説のまとめ記事はコチラからどうぞ!→過去問に挑戦!現役測量士の解説を読んで測量士補試験を攻略しよう!
さいごに
本ブログを参考にしていただきありがとうございます。
内容に関して不明な点、ご質問、指摘事項、感想などございましたら、コメントやメールにてご連絡ください。
励みになるとともに、本ブログをよりたくさんの皆様に有益なものにできると考えています。
ぜひお待ちしております。
お問い合わせ先:surveyor_kenzo☆aol.com
※ご連絡の際は☆を@に変更してください。